Image Alignment Applications
Local Alignment
- Tracking
- Stereo vision
Global Alignment:
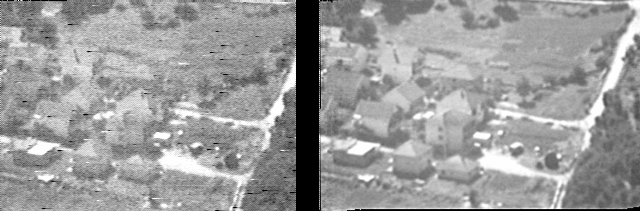
- Camera jitter elimination
- Image enhancement (e.g., denoising)
- Panoramic mosaicing (stitching multiple images to create panoramas)
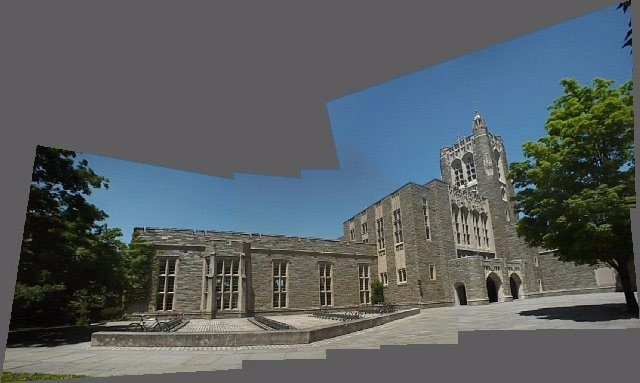
Image Enhancement
- Process of improving image quality by removing noise and artifacts.
Panoramic Mosaics
- Combining multiple overlapping images into a single wide-angle view.
Gigapixel Images
- Extremely high-resolution images created by stitching many smaller images.
Applications
- Historical views: Align historical images with current ones.
- Streetside imagery (e.g., Google Street View).
Image Alignment Approaches
Direct Alignment
- Find image transformation that maximizes similarity in overlapping regions.
- Typically performed in a coarse-to-fine manner.
Feature-Based Alignment
- Uses keypoints and descriptors (e.g., SIFT) to align images.
Steps for Feature-Based Alignment:
- Detect keypoints and compute SIFT(Scale-Invariant Feature Transform) descriptors.
- Generate candidate keypoint matches.
- Use RANSAC to select inliers from candidate matches.
- Fit the best transformation using inliers.
- Warp images according to the computed transformation.
- Blend overlapping regions smoothly.
SIFT Descriptors
- Divide image patch into sub-patches.
- Compute histogram of gradient orientations (8 angles) per sub-patch.
- Result: 128-dimensional descriptor ().
Candidate Matches:
- Match each descriptor from image A to the closest descriptor in image B using Euclidean distance:
- Accelerate matching using k-d trees.
- Refinement strategies:
- Mutual best match (both keypoints mutually closest).
- Ratio test (ratio of second-best to best match distances, threshold ~0.8).
Problem: Ambiguous Correspondences
- Occurs when multiple similar matches exist; resolved using mutual best match or ratio test.
RANSAC Algorithm
- Robust method for selecting correct matches among outliers.
RANSAC Steps:
- Randomly select minimal set of matches.
- Compute transformation from selected matches.
- Identify inliers consistent with the computed transformation.
- Repeat multiple times; choose transformation with most inliers.
- Re-estimate final transformation using all identified inliers.
2D Transformation Models
Fitting as Optimization:
Find transformation $$ T
T^* = \arg \min_T \sum_i L(T(x_i), x’_i)
## Warping Techniques **Forward Warping:** - Maps pixels from source to destination directly:g(x’) = f(h(x))
g(x’) = f(h^{-1}(x’))
**Interpolation:** Required when pixel values fall between discrete locations; typically bilinear interpolation is used. ## Blending Images - After warping, blend overlapping regions smoothly. ### Blending Techniques: 1. **Pyramid Blending:** - Gaussian Pyramid: progressively blurred versions of the image. - Laplacian Pyramid: captures details at different scales; computed as:L_i = G_i - expand(G_{i+1})
2. **Multiband Blending:** - High frequencies blended over small regions to avoid ghosting. - Low frequencies blended over larger regions to avoid visible seams. 3. **Minimum-Cost Cut:** - Finds boundary between overlapping regions minimizing visual artifacts and blur. 4. **Poisson Blending:** - Blends images by matching gradients while satisfying boundary conditions set by destination image. ## Homography (Projective Transformation) - Transforms points between two planes or images taken from cameras sharing a center: General form:x’ = \frac{ax + by + c}{gx + hy + i}, \quad y’ = \frac{dx + ey + f}{gx + hy + i}
H = \begin{bmatrix} a & b & c\ d & e & f\ g & h & i \end{array}
**Homography Estimation:** Solve linear system $$ Ax=0 $$, typically solved via Singular Value Decomposition (SVD):A x=0, \quad x=\text{eigenvector corresponding to smallest eigenvalue of } A^TA.
## Real-world Panoramic Stitching Challenges **Drift Problem:** - Aligning each frame sequentially can cause cumulative errors ("drift"). **Solution: Bundle Adjustment** - Optimizes all transformations simultaneously across multiple frames for global consistency. **Wide Field-of-view Problem:** - Cylindrical projection used for extremely wide panoramas to minimize distortion and preserve straight lines. --- These structured notes cover essential concepts and methods related to image alignment, stitching, feature-based alignment techniques, transformations, warping methods, and blending strategies—crucial topics likely to appear in your exam. <div style="text-align: center">⁂</div> [^1]: https://ppl-ai-file-upload.s3.amazonaws.com/web/direct-files/52995484/f57fda47-397e-4fa5-8aa3-1c2384141553/cos429_f16_lecture06_alignment.pdf